摘要 文中介绍了电池管理系统(BMS)的主要结构,通过选择上位机编程语言,确定系统分析,设计出满足系统要求的上位机界面并完成基于CAN总线的通信模块的设计。
摘要:文中介绍了电池管理系统(BMS)的主要结构,通过选择上位机编程语言,确定系统分析,设计出满足系统要求的上位机界面并完成基于CAN总线的通信模块的设计。
关键词:BMS;上位机;通信模块;CAN总线
0引言
汽车的出现极大地方便了人们的出行,也促进了汽车产业的飞速发展,如今汽车已成为一种“生活必需品”。但随之而来的污染也给地球环境带来了巨大的挑战,而新兴的新能源汽车成为解决问题的关键。电动汽车以其零污染、零排放的清洁性能成为环保主力。电池管理系统的发展研究成为制约电动汽车发展的关键。上位机作为电池管理系统的重要组成部分,承担着实现人机交互功能的重要责任。1电池管理系统的结构整个系统由四部分组成,其中包括检测模块、运算模块、控制模块以及通信模块。检测模块由各种不同的检测电路组成,分别针对不同状态量进行检测,主要包含温度、电压和电流检测。系统运行时,首先由检测模块对系统运行中的状态量进行检测、采集,并将这些数据交由运算模块和控制模块进行处理,然后通过通信模块传给上位机,上位机进行分析处理后在人机交互界面上显示,供使用者进行浏览。若还需要发出指令,则可以通过上位机界面同时完成【1】。
推荐期刊:《当代通信》秉承“为企业服务”的宗旨,积极宣传政府宏观产业政策、关注产业最新动态趋势、传播现代企业管理理念、解读信息产业营销策略、预测通信市场发展前景、探索企业创新模式、推介最新通信技术产品、助力信息产业发展。并努力成为:政府、通信企业和社会之间的桥梁;通信企业了解通信技术发展趋势和市场竞争态势的窗口;通信科研、技术、管理的专家、学者的论坛;国内外通信制造商捕捉商机,发布观点的平台。
2上位机的软件设计
2.1上位机语言的选择
LabVIEW(LaboratoryVirtualInstrumentEngi—neeringWorkbench)是虚拟仪器的一种,是实现计算机与仪器结合的优秀编程语言。LabVIEW又被称为G语言,以其图形化语言简化传统编程语言的编写过程,实现编程过程图形模块化,更容易编写,并且程序以图形化语言展现,方便编写者阅读和修改。
VisualBasic、VisualC++作为两种最常用的编程语言,具有零散的编程语言以及复杂的程序结构,技术人员需要耗费大量时间与精力,而且检测错误更为复杂,也不利于其他人员的解读与修改。而Iab—VIEW语言基本不包含程序代码,大大简化了编写过程,并且图形化程序对没有编程经验的人员十分友好,简单易学而且容易理解,可以很快上手,大大缩短学习语言和编写程序的时间。所以,本文选择Lab、厂IEw作为实现上位机软件的编程语言。
2.2系统分析
(1)系统功能模块。上位机的功能是实现BMS与使用者之间的人机信息交互,即实时、及时检测、采集电池管理系统运行时的各种状态量信息,对这些信息进行分析与处理,分析结果传到上位机进行显示,供使用者查询。
(2)数据通信模块。通信模块是联系整个电池管理系统运行的纽带,上述系统功能模块之间的信息传输都需要通过数据通信模块完成,系统运行的状态量主要包括温度、电流和电压等,这些状态量采集的及时性和准确性是支撑系统运行的基础。
(3)重要数据显示模块。该模块主要用来显示能衡量系统运行状态的主要状态量,例如总电流、总电压等。
(4)详细数据显示模块。该模块主要显示单体电池的状态信息。
(5)参数显示和设置模块。该模块主要功能包括各种报警上下限和容量状态的设置,前者包括温度报警、电压报警以及电流报警等,后者涵盖电池剩余电量(SOC)估算、电池健康状态(sHC)等参数的设置_2]。
2.3界面设计
上位机通过通信模块与主要控制系统进行通信,界面上首先包括通信接口的选择,还有每个控制器的温度和电压显示。接下来是参数的设置界面,包括最大充电电流、最大放电电流、总过压、总欠压等主要参数的设置,还有超过这些参数限定时的报警,如电池过充、过放、过温、欠温、过压、欠压报警等故障状态。还需要显示电压、电流、功率、SOC、SHC等参数来确定系统状态。最重要的主体部分还是电池组中各单体电池的状态量。以上的内容通过LabVIEw前面板进行展示。
3基于CAN总线的通讯模块的设计
上位机部分与下位机部分之间的信息传递和指令传输都是通过通信模块完成的,通信模块是整个电池管理系统运行的关键纽带。本文的通信模块采用CAN总线来设计实现,其主要优点有:
(1)传输速率快;
(2)传输距离远;
(3)多主发送的方式;
(4)完备的错误检测机制。
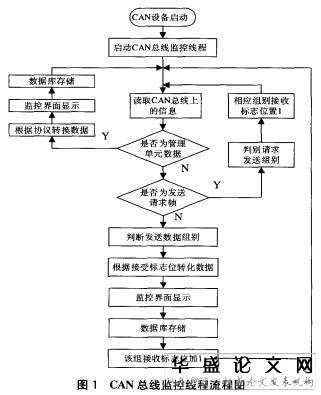
CAN通信模块主要负责作用于硬件和软件。其中,硬件部分即cAN接口卡设备,即通过上位机软件发出的指令来操作下位机,利用与该指令相关的库函数,实现基本操作功能,如初始化、复位等。软件部分完成监控和协议转换功能,即监控由下位机部分通过CAN总线传输过来的信息,一旦发现有信息传来,再将信息通过通信协议转换后,翻译成上位机软件可以识别的格式,让上位机进行读取并显示l_3]。整个过程如图1所示。
4结论
本文主要研究了电动汽车电池管理系统上位机系统的设计,包括上位机软件的设计与通信模块的设计。经过比较,上位机软件通过LabVIEW这个图形化程序语言来编写,并通过分析系统各方面功能来设计上位机前面板界面及后台程序;由于CAN总线优点突出,通信模块的设计也是基于CAN总线设计的。总体而言,该上位机系统具有一定的实用价值,能完成对电池管理系统运行的监控及调试。
参考文献:
[1]景小军.新能源电动汽车BMS开发EJ].自动化与仪器仪表,2017,(4):125一I27.
[2]申彩英,李兴全,王奇,等.电动汽车电池管理系统上位机设计[J].现代车用动力,2016,(1):42—45.
[3]谭兴国,曲凯.基于CAN总线的高精度程控电阻器设计[J].自动化仪表,2018,(1):99—102.
转载请注明来自:http://www.lunwenhr.com/hrlwfw/hrkjlw/11145.html